Disaster sites vary as widely as rescue missions. Using robotics to help often requires multiple robots to survey, climb, lift, or manipulate objects. Athena unites all these capabilities in a single, rugged, autonomous platform built for search and rescue.
The first documented use of robots in disaster response dates back to 1986, when machines were deployed at Chernobyl to help with radiation reconnaissance and cleanup. In the decades since, robots have shown up at countless other scenarios where sending a human being first was simply too dangerous. They’ve also been deployed alongside rescue workers, gathering data, conducting surveillance, and, in some cases, assisting.
The problem is, no two disaster sites are ever the same. Therefore, no search-and-rescue missions are identical. Some may require climbing stairs and gathering real-time data, while others may require crawling through rubble and opening latches. As a result, robots designed for very specific tasks may suddenly become useless when other tasks are required.

Clay Gilliland/C.C. 2.0
Flying robots are fast and excellent for surveying large areas, but they struggle to carry heavy tools or interact with the environment. Legged robots can traverse complex terrain, but they are often limited in payload and stability. Tracked robots, on the other hand, are strong and stable, but tend to sacrifice agility. You could deploy multiple robots, but that raises a different set of problems.
To address these challenges, researchers from the SIM Group at Germany’s Technical University of Darmstadt created Athena, an autonomous, rugged, and modular search-and-rescue robot built on open hardware. Rather than overspecializing, the robot combines multiple capabilities into a single adaptable platform.

Stefan Fabian
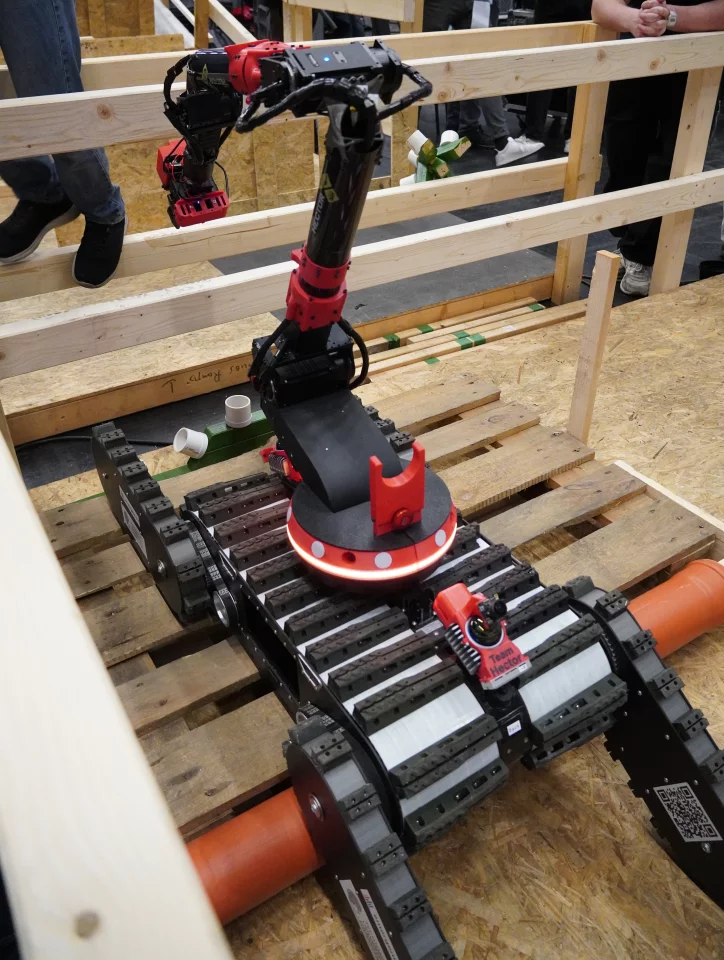
It primarily uses tracks to navigate various types of terrain. However, unlike conventional tracked robots, which have a relatively rigid footprint, Athena’s tracks are attached to four independently controlled flipper arms. On flat surfaces, the arms remain tucked in, and the robot moves like a normal tracked robot. However, each arm can rotate and reposition itself, allowing the robot to reconfigure its overall shape in response to the terrain.
For example, when Athena hits a step or an obstacle, the front flippers extend forward and upward, hooking onto the ledge before pulling up the rest of the robot and stabilizing it.
“Four individually reconfigurable flippers significantly improve terrain adaptability compared to the previous design, where front and back were each linked,” explains Stefan Fabian, a member of the research team under the emergenCITY research project.
When fully extended, the robot grows from 28 to 50 inches (711 to 1,270 mm) in length, a significant reach for a 110-lb (50-kg) machine that folds down to a size small enough to fit in airline luggage. During testing, Athena was able to scale steps up to 16 inches (406 mm) high and climb stairs inclined at up to 45 degrees. For context, a standard stair riser in the US is around 7.5 inches (191 mm).
Stefan Fabian
We’ve established that Athena has navigation on lockdown, but that’s only one piece of the puzzle in disaster scenarios. Another critical aspect is manipulation. Robots may need to open doors, turn valves, press buttons, or retrieve objects. Athena achieves this with an extendable arm.
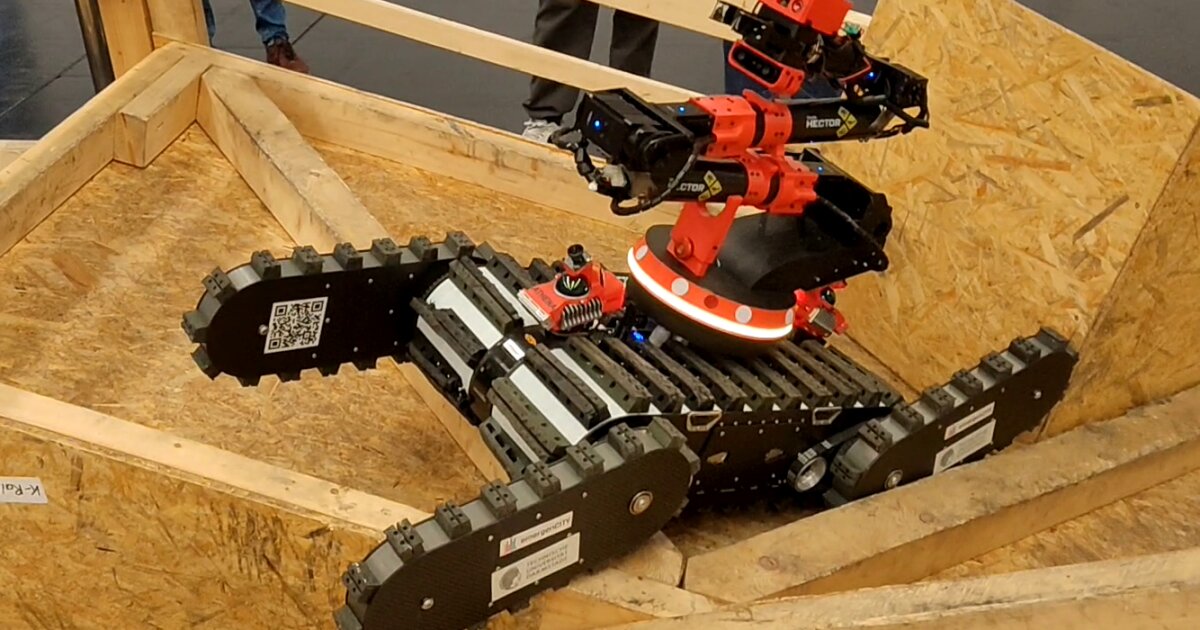
Mounted at the center of the robot is a seven-jointed robotic arm with a reach of over 59 inches (150 cm). The seven revolute joints make the arm kinematically redundant, meaning there are multiple ways to position the arm to achieve the same end-effector pose. In practice, this gives the system more flexibility to navigate around obstacles while still reaching a target.
The arm can lift 16 lb (7.25 kg) when close to the base and 6.4 lb (2.9 kg) when fully extended. It is designed to open doors, operate valves, press buttons, and collect samples. When not in use, it folds and locks magnetically onto a dedicated armrest to reduce its visual footprint and protect it during aggressive driving. At the end of the arm is a gripper that can apply up to 170 newtons (38 pound-force) of gripping force. A force-torque sensor at the wrist enables the arm to detect and respond to physical resistance.
Beyond navigation and manipulation, Athen features a suite of sensors that enables it to see practically everything. This suite includes an RGB-D depth camera, a thermal camera, a wide-angle RGB camera, a high-power LED, and LiDAR.

Stefan Fabian
The brain of the entire system is an onboard PC. However, GPU-intensive tasks are offloaded to an external processor. The two computers communicate over an internal 2.5 Gbit network, with a TP-Link outdoor access point providing wireless connectivity to a remote operator. The whole stack runs on a pair of LiPo battery boxes. The robot can also run directly from an external 24 V power supply when extended deployment is required, and a cable connection is feasible.
One of the less glamorous but critical aspects of Athena’s design is its emergency stop system. When a 110-lb machine with a powerful arm starts behaving unexpectedly, you need to be able to cut power immediately and without question. The Athena team custom-built their own emergency stop system that can cut power to the robot almost instantly, either through physical controls or a wireless remote. If communication is lost, the system automatically shuts down as a fail-safe.
Now, the Athena robot is neither the first nor the only of its kind. However, what makes it special is the unique combination of impressive features. It’s not every day you see a battery-powered, autonomous robot that can climb over debris, stabilize itself using its flippers, extend its powerful arm into a confined space, and carefully turn a valve while simultaneously scanning the environment with a host of advanced sensors. Not forgetting that the whole thing can fit into a suitcase. Interestingly, this characteristic was a non-negotiable for the team.
“The chassis has to fit into standard luggage. We have to travel to international competitions to test the robustness of our solutions, and robot transport is quite expensive. By being able to disassemble the robot and transporting it as checked luggage, we save quite a bit of money and time,” says Fabian
Despite all these qualities, perhaps the most distinctive thing about Athena, beyond any single technical specification, is the team’s philosophy. Most advanced robotic platforms are closed systems. They are expensive, proprietary, and difficult to modify. For researchers, this creates a bottleneck, significantly slowing down progress. The Athena team took the opposite approach, making the entire system open.
“Building a lightweight yet powerful robot with intelligent power management and strong compute from scratch is an extremely complex task, and we hope that by open-sourcing our complete design and sharing our lessons learned, other groups that need a custom platform for their research don’t have to start from square one,” states Fabian.
The full CAD files, PCB designs, and low-level software are all publicly available on GitHub. With that level of accessibility, we are bound to see upgraded, modded-out versions of Athena. All the better for search-and-rescue robotics!
A paper detailing the Athena platform was presented at the IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR) 2025 and published in IEEE Xplore.