A minimal-actuator robotic bicycle demonstrates high-speed mobility and obstacle-jumping capabilities using advanced control electronics.
A research team has developed a bicycle-style robot capable of travelling at high speed while balancing dynamically and even jumping over obstacles—demonstrating how advanced control electronics and mechanical design can deliver agility with surprisingly simple hardware.
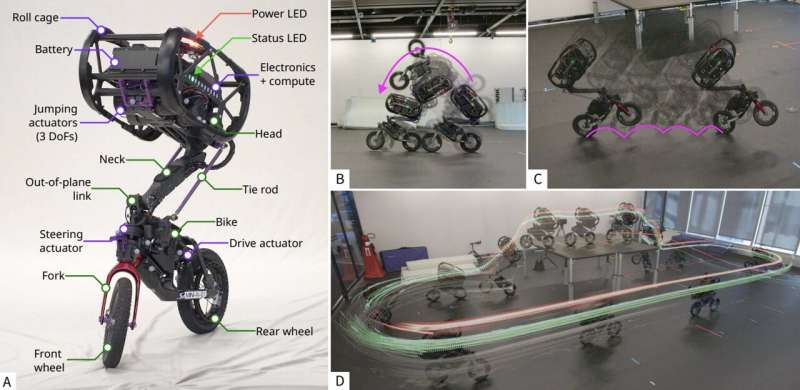
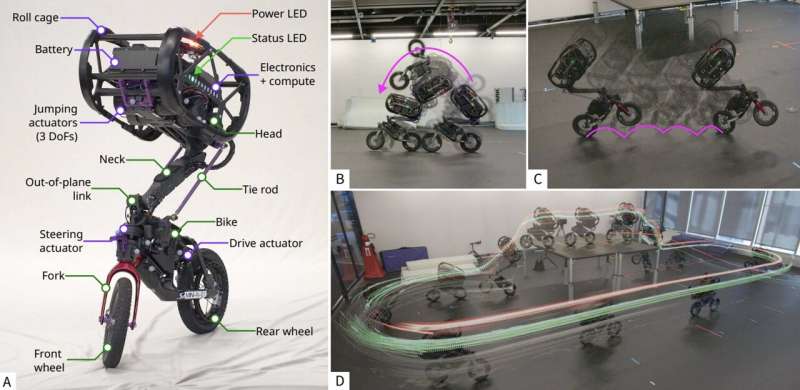
The prototype, called an ultra-mobility vehicle (UMV), takes inspiration from skilled cyclists who can perform tricks such as hopping over barriers, balancing in place and manoeuvring across uneven terrain. Researchers set out to replicate these abilities in a robotic system while keeping the mechanical complexity as low as possible.
Unlike many agile robots that rely on numerous motors and joints, the bicycle robot operates with only five actuated degrees of freedom. The design uses a rear-wheel-drive system, with a motor powering the rear wheel while the front wheel handles steering. By reducing the number of moving parts, the platform remains lightweight and mechanically simpler than legged robots that often require a dozen or more actuators.
The key to the robot’s agility lies in its electronic control system and mass-shifting mechanism. A heavy “head” module—housing batteries, computing hardware and actuators—is connected to the bicycle frame through a powered linkage resembling a neck. By rapidly shifting this mass, the robot can adjust its centre of gravity to maintain balance or generate the force needed to jump.
This approach mimics how human riders move their bodies to stabilise a bicycle or launch into a hop. When the actuators reposition the head module, the robot can crouch, shift sideways to maintain stability, or propel itself upward to clear obstacles. The result is a two-wheeled robot that combines the efficiency of wheeled vehicles with the agility typically associated with legged machines.
Researchers say the project demonstrates that advanced mobility does not necessarily require complex mechanical architectures. Instead, pairing simple hardware with sophisticated control algorithms can produce athletic robotic behaviours while reducing weight, manufacturing cost and failure points.
The team views the robotic bicycle as a test platform for future mobility systems that must travel quickly across varied terrain. Potential applications could include inspection robots, search-and-rescue platforms or exploration vehicles designed to navigate environments where both speed and obstacle-handling capability are essential.