It’s fairly easy for people to learn from other people – we’ve been doing it for around 300,000 years – because we can observe, copy, and modify what they’re doing. It’s less easy for us to learn from other animals that way, because the less our cognition and bodies are alike, the harder it is to copy and modify what they do. Learning about plants, fungi, protozoa, and bacteria is easy enough, but learning from them? Forget it.
So, what about robots? Sure, we can program them to do what humans do (and at much faster speeds), and they can learn from observing humans at work, but can we “teach” the same physical skills to robots with different structures, operating systems, and code?
Researchers in the Learning Algorithms and Systems Laboratory (LASA) in the School of Engineering at Switzerland’s Federal Technology Institute of Lausanne (EPFL) have created a new way to help robots emulate human activity, so that highly various robots won’t need humans to customize code to suit each robotic type. For researchers and industry, such a system offers enormous cost- and time-savings.
In their Science Robotics paper, Sthithpragya Gupta and Aude Billard discuss how kinematic intelligence – a new approach to learning-from-demonstration (LfD) – allows robots that may be shaped as differently from each other as R2D2 and a dishwasher to gain new skills from observing the same demonstration by a human teacher.
2026 LASA EPFL CC BY SA
While roboticists have already been using LfD for robots of the same model, kinematic intelligence “scans” activity – mathematically converting observed action into a strategy adaptable for each robot’s individual joint and movement limits and other bodily constraints and advantages. After learning from a few or even just one demonstration, the “student” robots – regardless of their body types – use the “globally stable dynamical system” to succeed at their new tasks.
“Each robot handled different steps of the task,” says co-first author Sthithpragya Gupta, “and the system performed successfully even when the step allocation was changed. Each robot interprets the same skill in its own way, but always within safe and feasible limits.”
As LASA head Aude Billard notes, “This work addresses a long-standing challenge in robotics: how to transfer a learned skill across robots with different mechanical structures, while guaranteeing safe and predictable behavior.” Kinematic intelligence could “significantly reduce the time and expertise needed to deploy robots in real-world settings.”
Kinematic intelligence began with EPFL researchers motion-capturing humans setting, shoving, tossing, and otherwise manipulating objects.
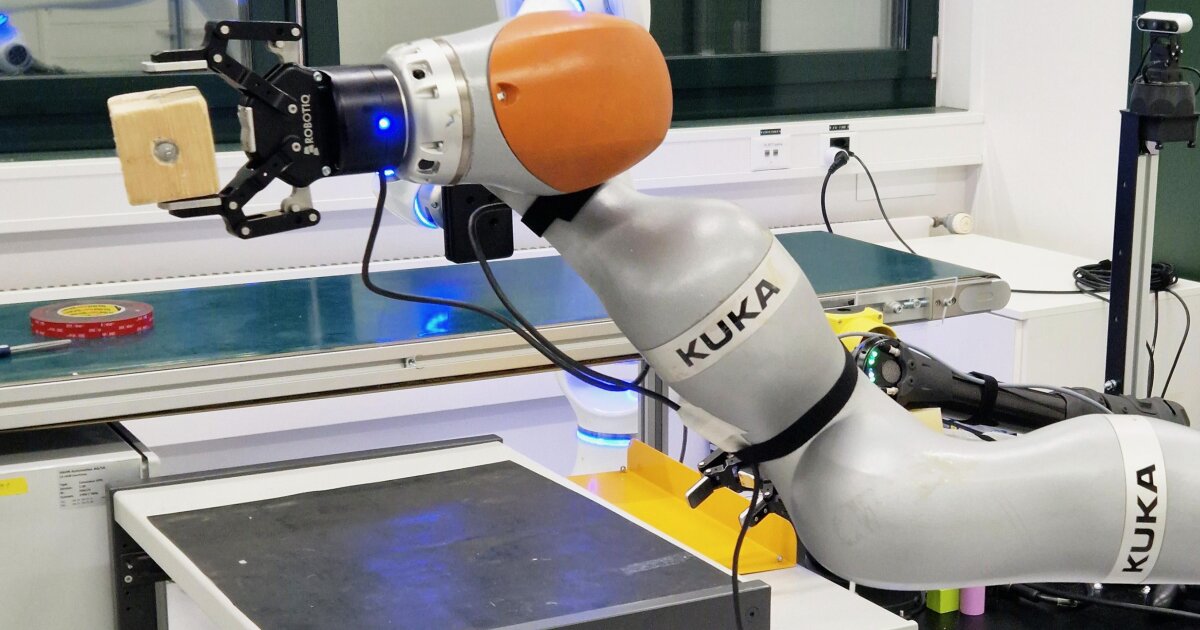
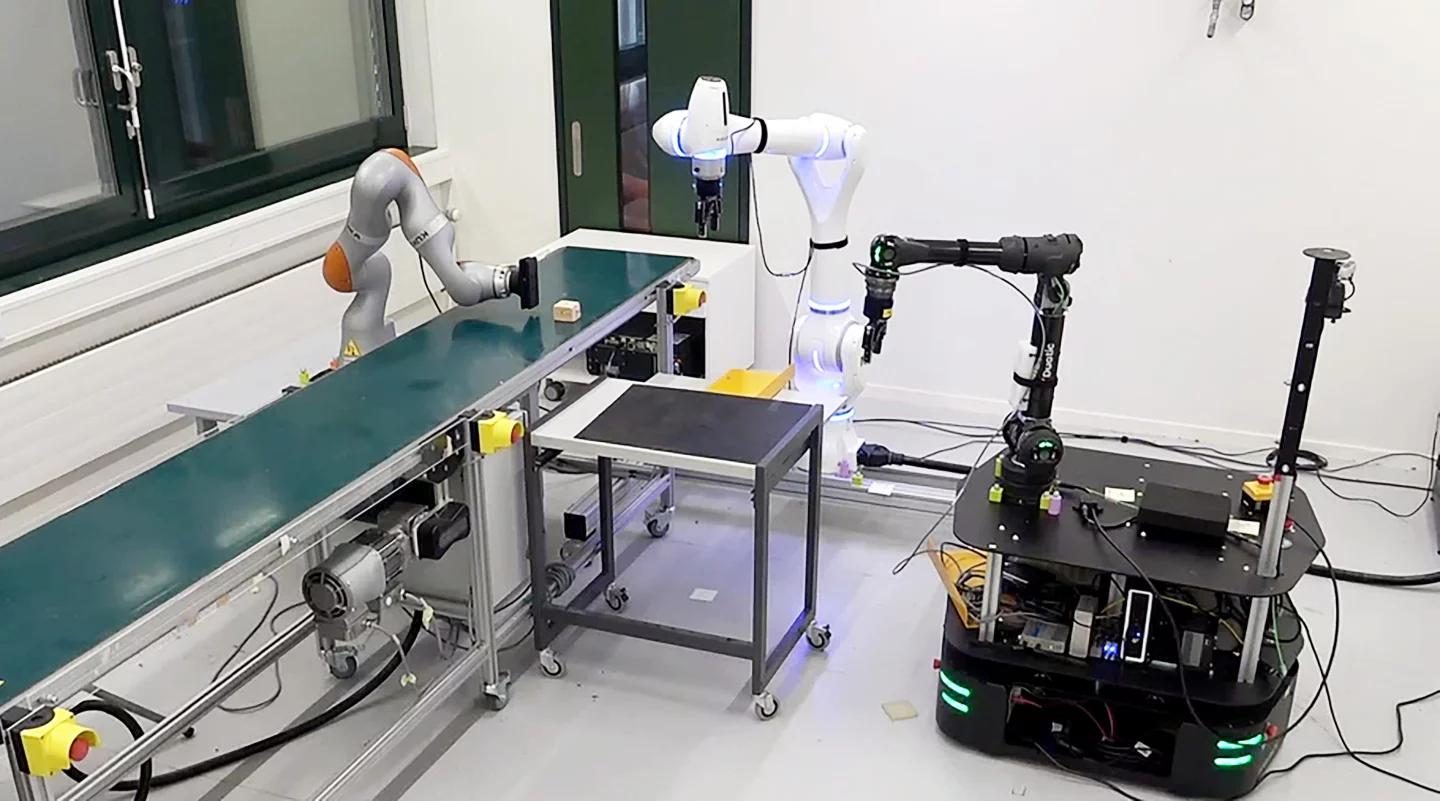
Then they created a system for classifying varying robotic physical constraints such as balance-limits and joint range-of-motion, and blended that information with the motion-capture data to develop their robotic observational and adaptational learning. During experiments, after observing humans, three completely dissimilar commercial robots could push wooden blocks from a conveyor belt onto a work station, move them onto tables, and toss them into receptacles safely and reliably.
If the work proceeds as the researchers hope it will, the results will include allow humans to simply describe novel actions for robots to perform – without robotic observation, and certainly without new coding. “Our goal,” says co-first author Durgesh Haribhau Salunkhe, “is to remove the need for technical expertise while still ensuring safe and reliable operation. The user brings the idea and the desired behavior, and the robot should take care of the rest.”
Source: EPFL